En la exploración de la robótica y la electrónica de potencia, el control de la dirección es un requisito fundamental. Este proyecto se centra en la implementación más pura y sencilla de un sistema de tracción bidireccional para una plataforma móvil (un carro con ruedas), utilizando el driver de motor L293D y una interfaz de control compuesta por solo cuatro botones pulsadores.
La restricción de diseño más notable es la exclusión total de cualquier elemento de memoria o control programable (sin Arduino, microcontroladores, o Biestables de compuertas lógicas). Esta limitación define el comportamiento del sistema: el movimiento de las ruedas será puramente momentáneo. Las ruedas giran mientras el botón esté presionado y se detienen inmediatamente al soltarlo, eliminando la necesidad de lógica compleja y reduciendo el sistema a su esencia: la conmutación directa de potencia.
Este enfoque sacrifica la comodidad de un estado sostenido, pero simplifica drásticamente el cableado y resalta el papel irremplazable del L293D como el puente de potencia entre la baja corriente de la señal de control y la alta corriente de operación de los motores.
🔩Funcionamiento
Para este proyecto desarrollaremos un sistema que permita controlar el sentido de giro de dos motores utilizando el circuito integrado L293D y cuatro botones, sin necesidad de un microcontrolador. El circuito permitirá manejar el sentido de giro de los motores mediante los cuatro botones: dos para controlar el primer motor (uno para girar hacia adelante y otro hacia atrás) y dos para el segundo motor, con la misma funcionalidad.
El Circuito Integrado L293D es el componente central, un driver de motor de doble puente H. Su función es permitir que las señales de control de baja potencia (los 5V del botón) conmuten las corrientes altas necesarias para alimentar los motores.
El L293D contiene dos Puentes H completos, permitiendo el control independiente de dos motores DC. La inversión de giro se logra mediante la activación de sus pines de entrada:
| Pin de Entrada 1 (INx) | Pin de Entrada 2 (INx+1) | Estado Resultante del Motor |
|---|---|---|
| HIGH (Pulsado) | LOW (Liberado) | Giro en Sentido 1 (e.g., Horario) |
| LOW (Liberado) | HIGH (Pulsado) | Giro en Sentido 2 (e.g., Antihorario) |
| LOW | LOW | Parada (Freno Flotante) |
| HIGH | HIGH | Parada (Freno por Cortocircuito) |
Al no contar con un microcontrolador o generador de pulsos para la Modulación por Ancho de Pulso (PWM), el control de velocidad es imposible. Los motores operarán a su velocidad máxima permitida por el voltaje de la fuente de potencia.
Para garantizar la activación, los pines de Habilitación (Enable) del L293D (Pin 1 para el Motor A y Pin 9 para el Motor B) se conectan permanentemente al voltaje lógico (VCC1), es decir, a 5V. Esto mantiene los puentes H listos para conducir corriente en cuanto la señal de dirección sea aplicada.
🔨Componentes
| Componente | Cantidad | Especificación | Función |
|---|---|---|---|
| Circuito Integrado | 1 | L293D | Control de motores |
| Motores | 2 | 5v DC | Rotar |
| Botones | 4 | Pulsadores | Mover los motores |
| Cables de conexión | n | Unir los componentes | |
| Fuente de Alimentación | 1 | 5v DC | Suministro de energía |
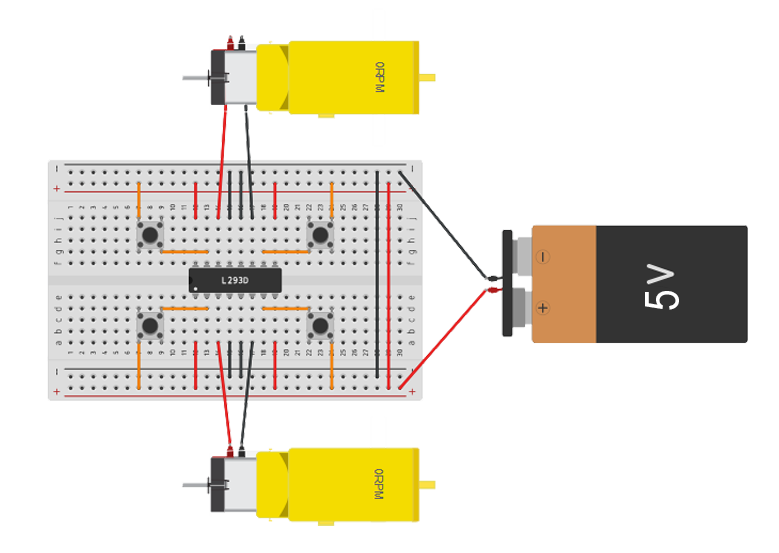
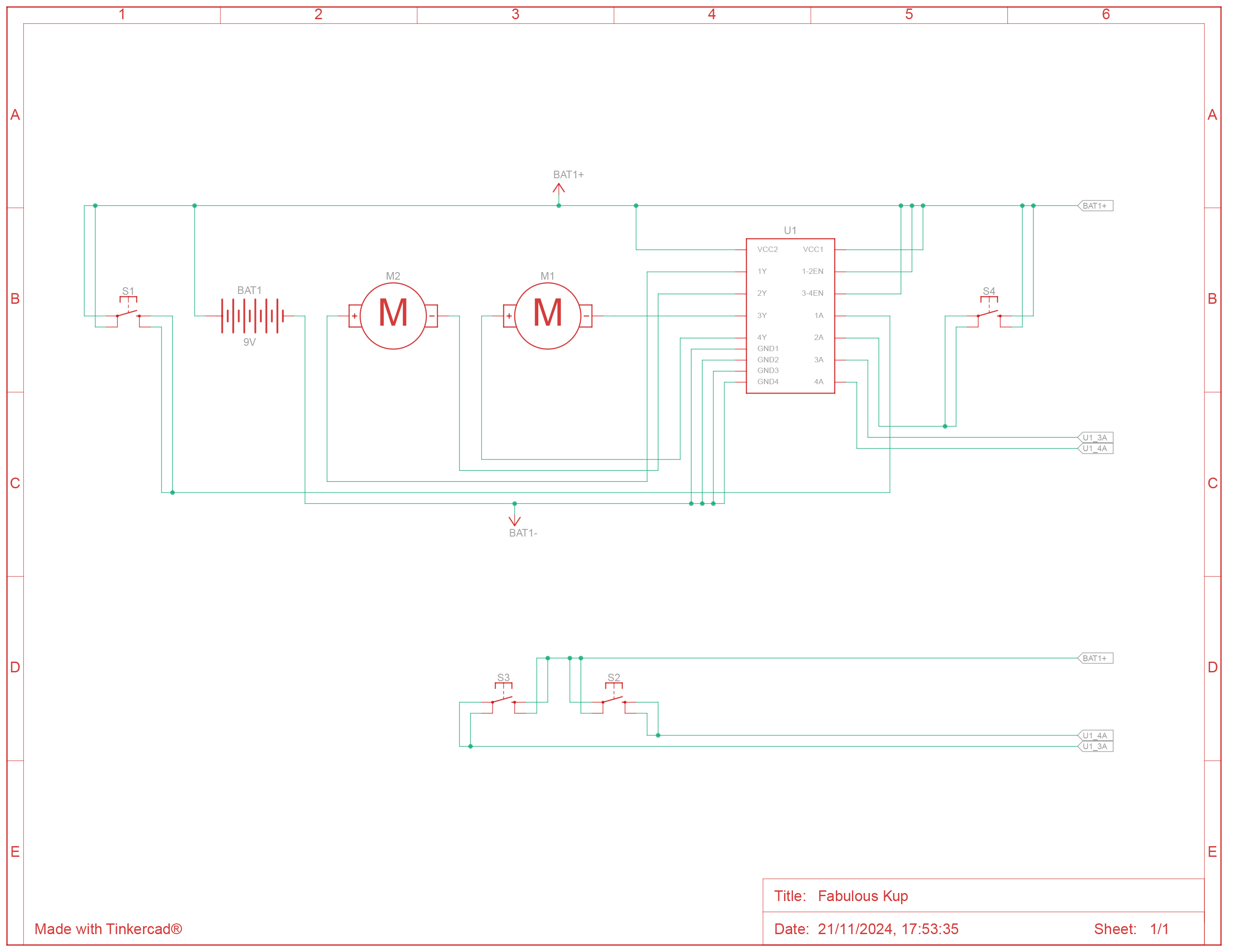
🔌Conexiones
- VCC a pin 1, 8, 9 y 16
- GND a pin 4, 5, 12 y 13
- Botón 1 entre VCC y pin 2
- Botón 2 entre VCC y pin 7
- Botón 3 entre VCC y pin 10
- Botón 4 entre VCC y pin 15
- Motor 1 entre pin 3 y pin 6
- Motor 2 entre pin 11 y pin 14
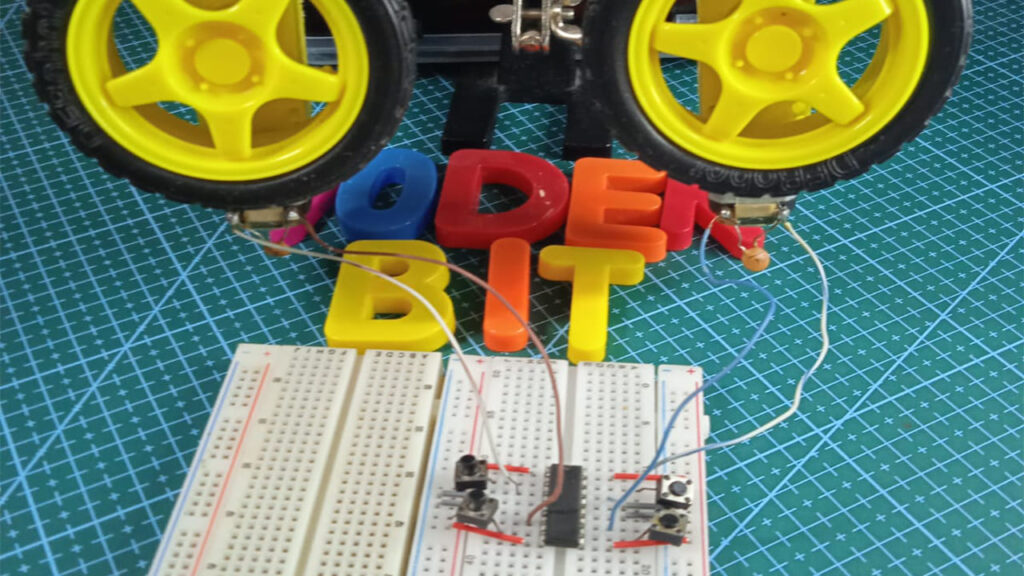
🖌️Diseños
🎬Videos
📑Conclusión
Este análisis detallado ha demostrado que, al restringir la electrónica a los componentes más básicos, se elimina la capacidad del sistema para “recordar” el estado de giro. El proyecto evoluciona hacia una máquina de estado cero donde la simplicidad es su mayor virtud y su principal limitación:
- Eliminación de la Complejidad Lógica: Al omitir microcontroladores y lógica discreta, se anula la necesidad de código, debouncing y complejos circuitos de memoria (Biestables RS). El sistema es inmediato y determinista.
- Control Binario Puro: Los motores operan en un estado binario de ON (pulsado a máxima velocidad) o OFF (liberado). No existe el control de velocidad (PWM) ni la capacidad de mantener el giro sin contacto.
- El L293D como Interruptor de Potencia: El driver no actúa como un componente inteligente, sino como un amplificador de corriente que traduce el pulso de 5V del botón en el voltaje de potencia total (VS) para los motores.
En esencia, este diseño es la forma más honesta y fundamental de control de tracción. Requiere la atención y el esfuerzo constante del operador, pero ofrece a cambio un sistema de cableado mínimo, robusto y altamente fiable, ya que los problemas de la conmutación electrónica se reducen al instante exacto de la pulsación. Es un testimonio de cómo la función del microcontrolador puede ser evadida, aunque con una inevitable pérdida de automatización y comodidad.