Funcionamiento
En este proyecto se demostrará cómo controlar la posición de un servo motor utilizando un potenciómetro y una placa de Arduino. Los servo motores son ampliamente utilizados en aplicaciones que requieren un control preciso de la posición, como en robótica, modelos a escala y automatización. El uso de un potenciómetro permitirá ajustar la posición del servo motor de manera manual y en tiempo real.
Componentes
- Placa Arduino (cualquier modelo como Arduino Uno, Nano, etc.)
- Servomotor(5V)
- Potenciómetro(5k-10k)
- Cables de conexión
- Fuente de alimentación (5v)
- Protoboard (opcional para pruebas)
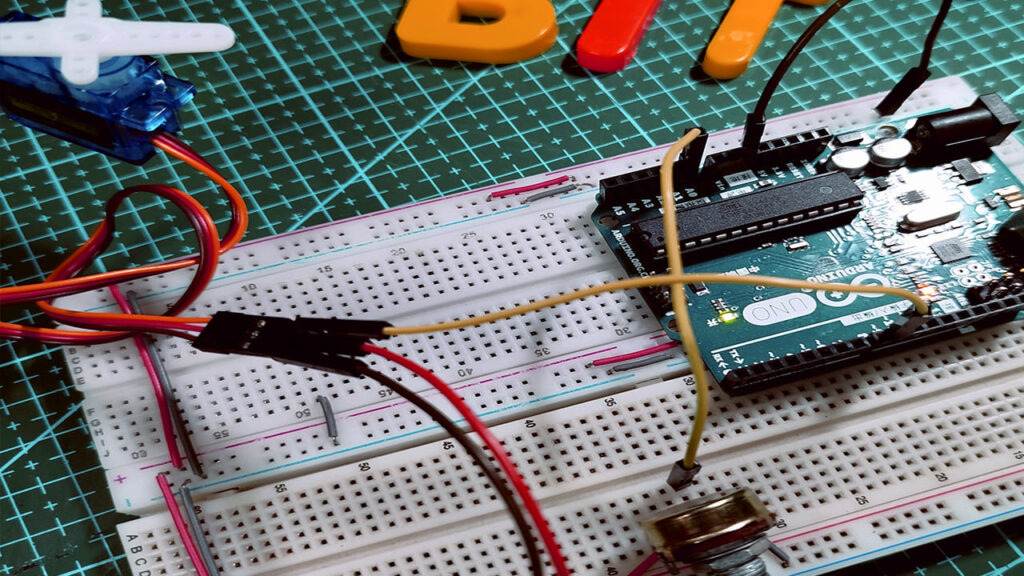
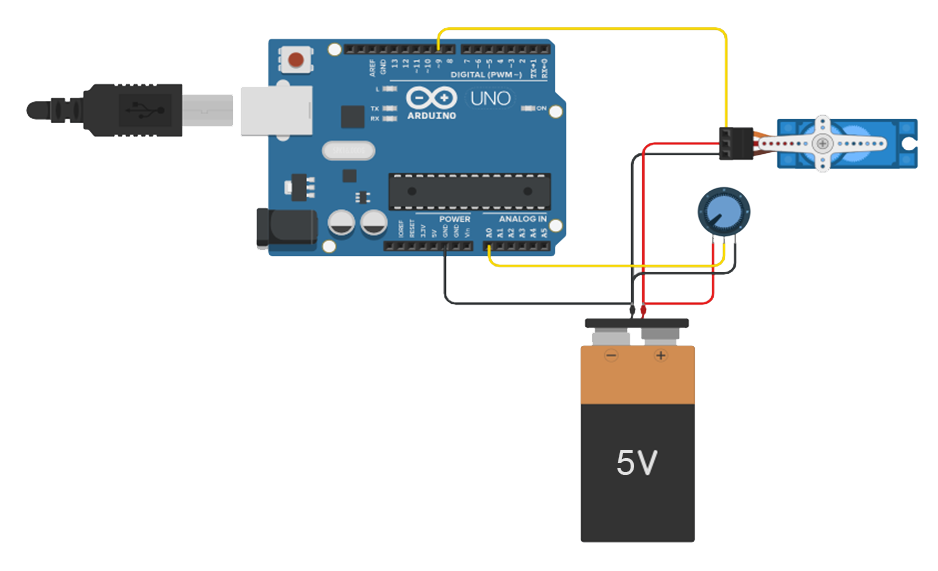
Conexiones
- Conectar el pin de señal del servo motor al pin digital 9 del Arduino.
- Conectar el pin de alimentación del servo motor (rojo) a 5V de la fuente de alimentación.
- Conectar el pin de GND del servo motor (negro) a negativo de la fuente de alimentación.
- Conectar las terminales del potenciómetro a 5V, GND de la fuente de alimentación.
- Conectar la terminal central del potenciómetro al pin analógico A0 del Arduino.
Código
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | #include <Servo.h> Servo miServo; // Crear objeto Servo int potPin = A0; // Pin analógico al que está conectado el potenciómetro int valorPot; // Valor leído del potenciómetro int angulo; // Ángulo para mover el servo motor void setup() { miServo.attach(9); // Asignar el pin 9 al objeto Servo } void loop() { valorPot = analogRead(potPin); // Leer valor del potenciómetro angulo = map(valorPot, 0, 1023, 0, 180); // Convertir el valor a un ángulo de 0 a 180 grados miServo.write(angulo); // Mover el servo al ángulo correspondiente delay(15); // Esperar 15 ms para que el servo complete el movimiento } |
Diseños
Videos
Conclusión
A través de este proyecto, hemos aprendido a controlar un servo motor de 5V mediante un potenciómetro y una placa de Arduino. Esta aplicación básica de control de posición es una introducción práctica a conceptos más avanzados de robótica y automatización.